
多模態移位機
本案例透過性別化創新概念,深度報導南臺科技大學林聰益教授團隊研發之「多模態移位機」,並獲益自國科會整合型計畫「性別化創新輔具之應用研究:多模態移位機與職業健康風險治理」(尤素芬總主持,執行期間106-108年)三項子計畫(分別由尤素芬、林聰益、張哲豪主持)已公開之結案報告,謹此致謝。
若讀者對於本文內容有任何疑問,敬請指正。
議題未能落實「零抬舉政策(No-Lift Policy)」,將增加照服員職傷風險
移位設備需考量生理性別差異,以因應目前照顧服務高度性別化的現況
現有的移位輔具未能兼顧不同失能程度者需求,增加照服員負荷
性別化創新1:看見照顧服務工作對女性造成更大負荷
方法:分析生理性別
性別化創新2:設計輕便可調整、適用於女性照服員的移位機
方法:工程創新程序
方法:參與式研究與設計
結論與下一步
進一步修正多模態移位機之結構與操作方式
加強照服員使用輔具的教育訓練
議題
在照顧服務中,為個案進行包含「床到椅」(輪椅、馬桶座、洗澡椅等)、「椅到床」、「床到床」等常見的「移轉位」,是從業人員每日皆需反覆執行的工作內容。然而,在欠缺利用移動輔具的背景下,照服者經常採取徒手移轉位,構成潛在的傷害風險。
未能落實「零抬舉政策(No-Lift Policy)」,將增加照服員職傷風險
目前的移動輔具大致可分為「人力輔助」與「機械動力」兩類(Cohen et al., 2010;轉引自廖泰翔、何思怡,2014)。人力輔助式移動輔具(如移位腰帶、移位板等)對於減輕腰椎壓力幫助有限,而操作電動移位機的時間可能是徒手搬運的2-3倍,影響工作效率。此外,缺乏操作輔具及移位機的相關訓練,也致使台灣的照顧服務員仍多以徒手作業為主(劉立文、羅宜文,2019)。
另外,經常性的徒手移轉位,很可能產生職業傷害。根據調查,81.48%的照顧服務員在從事此職業之前並無肌肉骨骼不適,但有92.06%在從業後發生此類不適症狀(施碧旻,2016)。
移位設備需考量生理性別差異,以因應目前照顧服務高度性別化的現況
根據衛福部資料,目前一般護理之家的照顧服務人力約有一萬三千餘位,男女比約為1:5(衛生福利部統計處,2022)。另外,專職、兼職或志願從事老人居家照顧服務者共計七萬餘人,其中女性約占85%(行政院性平會,2022)。顯示照顧服務的高度性別化。
然而照顧服務的工作環境尚未考慮到生理性別差異(如男女腰椎負荷限度不同),經常性的徒手搬運可能對女性照服員造成更大的身體負擔。而電力式的懸吊帶及站立式移位機重量較大,較需費力移動(廖泰翔、何思怡,2014),可能使女性照服員不易近用,使得零抬舉政策難以落實。
現有的移位輔具未能兼顧不同失能程度者需求,增加照服員負荷
由於現有的移動輔具功能較為單一,可能導致照顧者/被照顧者日常需使用多種輔具。一份個案研究發現,在被研究者病況演變的過程中,需長期倚靠三款輪椅輔具(趙品淳等,2021)。且即使訴諸移位機,其適用對象也略有差異,使失能程度不一的被照顧者各自需要不同的工具進行移位,增加照顧服務者的負荷。
目前,「零抬舉政策(No-Lift Policy)」(即以機械取代人力搬運,減低照服員的負荷)已成為國際趨勢。因此,強化移位輔具的使用,簡化並普及移位機的操作,將同時是台灣落實「零抬舉政策」並減低照顧服務員面臨的職業傷害的重要條件。
性別化創新1:看見照顧服務工作對女性造成更大負荷
由於照顧服務高度性別化的現況,在落實「零抬舉政策」的過程中,首先需要考慮照服員的生理性別差異,以便後續導入合適的移動輔具。此為發展友善女性照服者之移位機的第一項性別化創新。
方法: 分析生理性別
研究顯示,各年齡層女性與男性的身高、身體質量與肌肉量均有顯著差異,而肌肉量在45歲以後會逐漸衰減(Janssen等,2000)。男性有較高的軀幹肌力(詹美華等,1998)、最大握力與平均握力(梁宏瑋,2008)。而在抬舉時,施力的方式與部位也有性別差異。男性主要靠背部肌力,女性主要靠腿部肌力和骨盆力量;且在抬舉固定重量下,腰椎、關節的彎曲度以及骨盆的旋轉度等均有生理性別差異(李淑貞,2016)。
生理性別差異致使女性在抬舉活動時有更高的傷害風險(李淑貞,2016)。因此,在考量照顧服務員的身體負荷限度,並進一步安排合適的移位輔具時,納入生理性別因素是相當重要的。
照顧服務員由於長期使用各種徒手搬抬姿勢,很可能增加椎間盤相關疾病風險,我國的「職業性腰椎椎間盤突出認定參考指引」(黃百粲,2017)也將照服員列入具潛在傷害風險暴露之職業。以下藉著椎間盤疾病的風險為例,說明照服工作納入生理性別差異的重要性。
德國於2006年發佈的一份有關長年提重物或以軀幹屈曲姿勢工作而引起椎間盤疾病的職業病認定參考指引,依據生理性別分列各項徒手搬抬的風險負荷重量,其中女性負荷上限介於5-20公斤之間,約是男性的50%-71%(Bundesministeriums fuer Arbeit und Soziales,2006)。然而,據研究統計,照服職訓師所列出的培訓功能標準,照顧服務員需在「抬舉及腰」與「抬舉及胸」等項目達到約20公斤負重才能勝任(張辰楷,2013;引自張哲豪,2019),若對照上述德國的參考指引,此培訓標準已超過女性照服員的椎間盤疾病風險門檻。
同時,照服員年齡偏高,以45至54歲比例最多,養護型機構的照顧服務員更以55至64歲居多(鐘琳惠、藍福良,2019)。而人體肌肉量往往隨年齡而減少,且肌力與握力可能由於年齡的增長而衰減。綜合考量前述資料,女性照顧服務員在長期的徒手搬運工作之下,更有可能發生職業傷害。
藉由性別化創新的分析生理性別方法,有助在移位設備的研發階段納入參考女性的生理構造及身體負荷,設計出較為輕便,且在高度與重量方面利於女性照服員的移位機,以避免傷害。
性別化創新2:設計輕便可調整、適用於女性照服員的移位機
如前所述,在傳統的照顧服務工作環境以及有關工具的使用上,由於未能考量生理性別差異,使女性照顧者更容易發生肌肉骨骼不適(李淑貞,2016)。對此,南臺科技大學機械工程系林聰益教授團隊考量照顧者和被照顧者的生理性別差異,及照顧場域的需求,運用「通用設計(universal design)」概念研發出創新且省力又省時的「多模態移位機」。
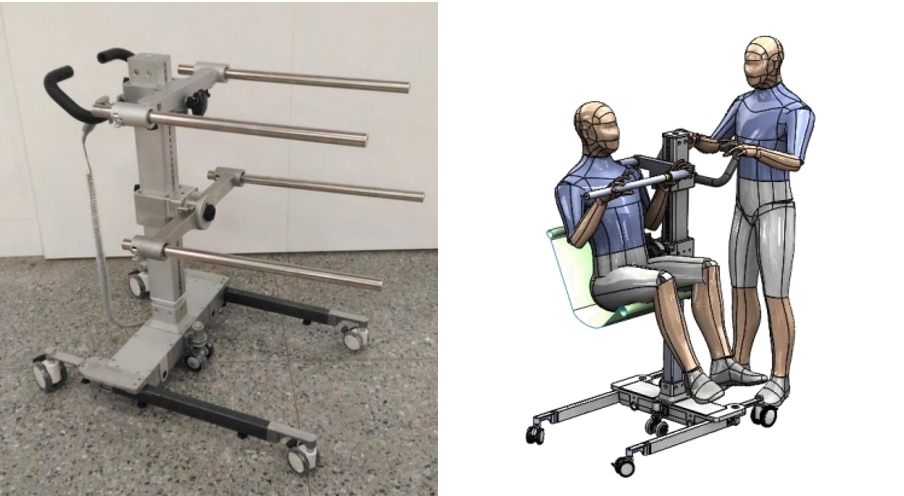
圖1.(左)多模態移位機。(右)多模態移位機操作示意圖。圖片均引自林聰益(2019)。
2016年完成的「多模態移位機」係以被照顧者的生活需求和減少照顧者的職傷風險為目標,進行創新的移位方法與設計,以解決目前市面上移位機的使用問題,滿足了長照場域的急迫需求。此機型之設計重點有三:模組化(適合各類患者在不同情境的需要)、人因化(考量被照顧者的生心理需求及移位、操作、使用方式)、簡便化(操作簡便,利於照服員單人作業)。(林聰益,2019)目前此「多模態移位機」已經發展至可成為每一使用者的「客製化專用輔具」,使其更具「性別化創新」的精神。
「多模態移位機」的性別化創新特色在於:操控輕便(操作省力、轉向明確),個別化調整容易,故能適用於不同失能程度和特徵者的需求,方便照顧服務者的應用與操作;同時,較小的機身更能適應女性照服員身體結構,且使用省力又簡化照護工序,故能降低傷害風險。此為性別化創新之二。
方法: 工程創新程序
林聰益團隊藉由創意性工程設計和實證照護模式等方法進行工程創新程序,以照顧者和被照顧者為中心,考量其性別化的差異和失能程度的不同,找尋最佳的移位與照護方案,以進行「多模態移位機」的研發。
創意性工程設計方法結合實證照護模式是能夠找到長期照顧系統的真正問題和需求,並能提供最佳的解決策略。在整個臨床照護過程中,移位其實不是目的,但是一個很大的門檻,因此,林聰益團隊摒棄市面現有移位機的設計思維,利用創意性工程設計方法建構出長照場域有意義的整體,關注人機環系統的每個環節,以了解每位照顧者和被照顧者、以及整個環境的種種問題與真正的需求,而「多模態移位機」則是此長期照顧問題的一個實用而有效的「系統化問題解決的策略」。
「多模態移位機」是極具「性別化創新」精神的輔具,其能針對不同失能程度和身心狀態,提供適當的移位/轉位輔具和方式,進行其各種日常生活情境的健康照護。其中,身心狀態還包含照顧者與被照顧者的性別狀態,包括生理性別(即身體需求,如身體活動能力、感知敏感度)與社會性別(即社會性需求,如對科技接納能力、模組的安裝與調整等操作能力)。林聰益團隊的多模態移位機發展出「模組化」、「人因化」及「簡便化」(林聰益,2019)特性,使該產品可做到移位、照護、復健的「一機多用」,照服員易於操作並減輕負擔。說明如下:
- 模組化:如以被照顧者失能程度的變化作為參考標準,根據自主行動力區分「可以行走」、「行走吃力」、「無法行走」以及「僅能躺臥」等三種被照顧者,並設計出至少五種起身模組適應其不同能力與情境。照服員可以依據被照顧者在不同情境下的需要,安裝合適的模組與配件運用。
- 人因化:每一模組都可根據使用者人因工程參數(如人體各部尺寸、姿勢、動作等)進行適當的調整,更可使用客製化的配件,以滿足使用者的需求,並達到最佳的移位與照護方式。
- 簡便化:其上述的模組安裝與調整,以及配件的運用都可簡便的操作,而且其主機操控輕便、迴轉空間較小、轉向明確更具機動性,可支援居家及機構內部的移位工作,並且有利於照服員單人作業(林聰益,2019)。
方法: 參與式研究與設計
為實際評估多模態移位機的操作方式是否可實際降低照服員的傷害風險,尤素芬、林聰益及張哲豪合作主持的國科會整合型研究計畫,於2016年12月至2017年4月以及2018年7月至2019年5月間,分別在台南市及嘉義市的長照機構針對28位女性照顧服務員進行兩階段觀察。
此項整合型研究計畫以勞工姿勢評估系統(Ovako Working Posture Analysis System, OWAS)作為方法,觀察照服員徒手搬運、使用市面移位機以及多模態移位機的過程。據Karhu等(1977),OWAS方法可分為兩個部分,首先是針對工作姿勢的觀察,其次是用以重新設計作業方式或場域的一套標準,其中針對姿勢的觀察分為四級,等級愈高,職業傷害的風險愈高。
該整合型計畫研究團隊針對照服員徒手或操作移位機的姿勢,依據上述OWAS等級進行編碼並計算平均數值。結果發現,使用多模態移位機進行「床至輪椅」、「輪椅至床」轉移位的風險等級介於第二級至第三級之間(平均2.0、2.1),明顯低於徒手移轉位(平均2.7、2.9),並略低於市面移位機(平均2.3、2.1)(張哲豪,2019)。顯示利用多模態移位機轉移位,能夠降低照服員的傷害風險。
該研究團隊檢視個別受測者之編碼後,發現市面移位機的構造較大,懸吊臂較高,以致照服員使用時往往需要單手或雙手抬舉過肩。同時,照服員退出機器時須拆除吊布及掛繩,為求效率,易採取彎腰、抬舉手臂過肩等的姿勢,傷害風險較高。另一方面,由於多模態移位機之構造較小,照服員操作時較不需採取雙手抬舉過肩等姿勢,可降低傷害風險(尤素芬,2019)。
此參與式研究顯示多模態移位機改良過去同型產品的缺點,其輕巧並可調整的機身,能夠適應平均身高較低的女性照顧服務員。
進一步修正多模態移位機之結構與操作方式
林聰益主持之子計畫發現照服員測試使用多模態移位機三個月後,主觀認知的易用性反而有所下降,因此,該機型可能尚有若干設計問題待修正:例如納入更多不同的被照顧者(如重症患者)以及簡化配件及操作步驟,使較年長的照服員也能輕鬆上手。對此,該團隊仍持續修正中,到目前上述問題都已經提出更佳的解決方案,易用性不但提升,而且簡化移位與照護的工序,達到省時省力的目的。
加強照服員使用輔具的教育訓練
使用移位機相較徒手搬運耗費更多時間的原因,除了現有移位機的配件過於複雜,也可能肇因於相關訓練往往強調徒手搬運技巧,使照服員對操作移位機感到陌生。因此照服機構可加強提供輔具相關的教育訓練,張哲豪主持之子計畫亦發現移位機本身的訓練手冊亦可更加精簡,例如以影片取代文字,減少照服員學習的門檻。
參考資料
Bundesministeriums fuer Arbeit und Soziales (2006). Berufskrankheiten-Verordnung Merkblaetter zu Berufskrankheiten. Bundesarbeitsblatt (Iva 4-45222-2108). 取自https://www.baua.de/DE/Angebote/Rechtstexte-und-Technische-Regeln/Berufskrankheiten/pdf/Merkblatt-2108.pdf?__blob=publicationFile&v=3
Janssen, I., Heymsfield,S. B., Wang, ZM., Ross, R. (2000). Skeletal muscle mass and distribution in 468 men and women aged 18–88 yr. J Appl Physiol, 89: 81-88.
Karhu, O., Kansi, P., Kuorinka, I. (1977). Correcting working postures in industry: A practical method for analysis. Applled Ergonomtcs, 8(4): 199-201.
尤素芬主持(2019)。性別化創新輔具之應用研究:多模態移位機與職業健康風險治理-輔助科技之利用與照顧工作之職災風險治理模式探討:以多模態移位機為例。(科技部補助專題研究計畫成果報告,MOST 106-2629-S-037-002-MY2)。高雄,高雄醫學大學醫學社會學與社會工作學系。
行政院性平會(2022)。照顧服務員人數。取自
https://www.gender.ey.gov.tw/gecdb/Stat_Statistics_Query.aspx?sn=IE4UKn!NQPyYRRY2FyOrLg%40%40&statsn=G6R7Y6EdU%24wLPNZqkAKIYg
%40%40&d=194q2o4!otzoYO!8OAMYew%40%40
李淑貞主持(2016)。不同性別之家庭照顧者於照顧工作的移位輔具需求與使用問題探討。(科技部補助專題研究計畫成果報告,MOST 104-2629-E-010-001-)。台北,國立陽明大學ICF暨輔助科技研究中心。
林聰益主持(2019)。性別化創新輔具之應用研究:多模態移位機與職業健康風險治理-性別化多模態移位機之應用研究:以照顧服務員為對象。(科技部補助專題研究計畫成果報告,MOST 106-2629-S-218-001-MY2)。台南,南臺學校財團法人南臺科技大學機械工程系暨研究所。
施碧旻(2016)。照顧服務員肌肉骨骼危害調查與作業姿勢評估。中山醫學大學職業安全衛生學系碩士班學位論文。
張哲豪主持(2019)。性別化創新輔具之應用研究:多模態移位機與職業健康風險治理-性別化創新輔具之應用訓練:以多模態移位機降低照顧服務員之職傷風險。(科技部補助專題研究計畫成果報告,MOST 106-2629-S-006-001-MY2)。台南,國立成功大學職能治療學系。
梁宏瑋(2008)。臺灣地區成人手握力及捏力之研究分析。大仁科技大學環境管理研究所碩士論文。
黃百粲(2017)。職業性腰椎椎間盤突出認定參考指引。取自 https://www.oma.org.tw/download/職業性腰椎椎間盤突出之認定參考指引.pdf 。
詹美華、林居正、王淑芬(1998)。台灣成人軀幹肌力之評估。臺灣醫學2(4): 388-396。
廖泰翔、何思怡(2014)。長照機構推動No-Lift Policy的經驗分享。長期照護雜誌18(1): 41-48。
趙品淳、張哲豪、盧依萍、林聰益、尤素芬、曾明基(2021)。重度下肢障礙者於老化過程中對客製化移位輔具之需求。南臺人文社會學報 25: 39-67。
劉立文、羅宜文主持(2019)。照顧服務員工作輔具調查研究。勞動部勞動及職業安全衛生研究所。
衛生福利部統計處(2022)。一般護理之家護理人員及照顧服務員人力統計表。取自 https://www.mohw.gov.tw/dl-13472-e14e708b-8065-472e-a797-32f048c55149.html
鐘琳惠、藍福良主持(2019)。長照產業人力結構與職場環境問題分析及因應對策研究。勞動部勞動及職業安全衛生研究所。